
IHMC’s Nadia Is a Versatile Humanoid Teammate

The Florida Institute for Human & Device Cognition (IHMC) is well acknowledged in bipedal robotics circles for educating extremely sophisticated humanoid robots to wander. Due to the fact 2015, IHMC has been dwelling to a Boston Dynamics Atlas (the DRC variation) as properly as a NASA Valkyrie, and considerable development has been made on advancing these platforms towards responsible mobility and manipulation. But fundamentally, we’re chatting about some quite old components in this article. And there just aren’t a large amount of very good substitution solutions (available to scientists, in any case) when it arrives to humanoids with human-comparable power, pace, and overall flexibility.
Various years ago, IHMC made a decision that it was superior time to make its possess robot from scratch, and in 2019, we noticed some extremely neat plastic principles of Nadia—a humanoid designed from the ground up to complete helpful responsibilities at human pace in human environments. Immediately after 16 (!) experimental plastic versions, Nadia is now a serious robot, and it presently seems very impressive.
For a extended time, we’ve been pushing up versus the limits of the components with DRC Atlas and Valkyrie. We haven’t been in a position to completely discover the boundaries of our program and our controls. With Nadia, it is the other way all around, which is truly interesting from a analysis point of view.
—Robert Griffin, IHMC
Made to be essentially the next technology of the DRC Atlas and Valkyrie, Nadia is more quickly, much more adaptable, and strong sufficient to make an great study system. It’s a hybrid of electric and hydraulic actuators: 7 degrees-of-flexibility (DoF) electric powered arms and a 3 DoF electrical pelvis, coupled with a 2 DoF hydraulic torso and 5 DoF hydraulic legs. The hydraulics are built-in clever actuators, which we’ve included in the past. Nadia’s joints have been arranged to improve range of movement, that means that it has a dense manipulation workspace in front of by itself (exactly where it really matters) as nicely as really cellular legs. Carbon fiber shells masking most of the robot enable for risk-free speak to with the atmosphere.
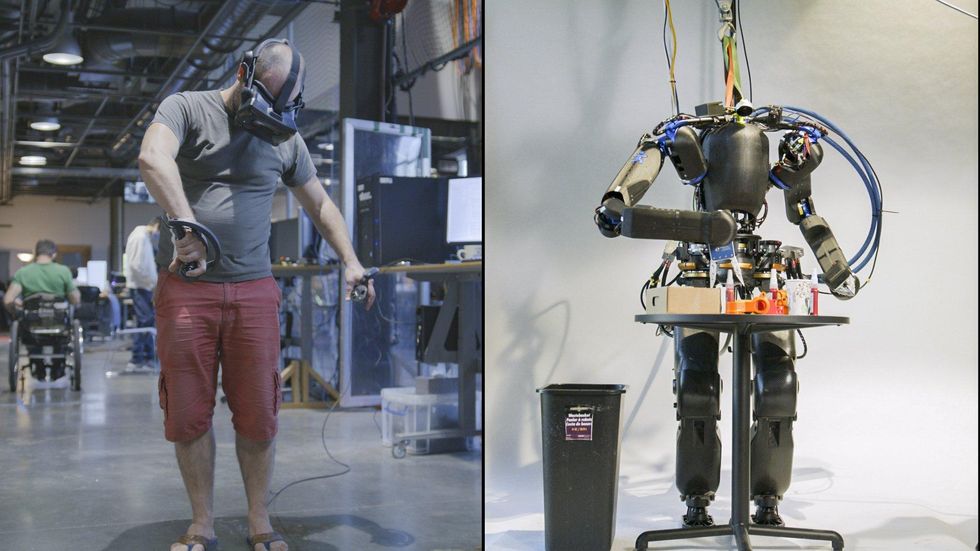
Teleoperation through immersive virtual fact will help Nadia perform complex duties.IHMC
That massive manipulation workspace is especially appropriate due to the fact there’s a great deal of emphasis on immersive virtual fact teleoperation with Nadia. Not that autonomy is not important, but the idea driving Nadia has been shaped (at least in component) by IHMC’s experience at the DARPA Robotics Problem Finals: Preferably, you want the robotic to take care of everything it can on its have, even though having a human in a position to choose additional direct handle more than complex tasks. Even though it is not the fantasy of a robot getting absolutely autonomous, the reality is that in the around term, this method is an right away practical way of having robots to reliably do helpful items in unstructured environments. Overall, the purpose with Nadia is to run as shut to human speed as probable when performing city exploration and manipulation tasks. And if that consists of a human specifically teleoperating the robot because that is the ideal way of carrying out issues, Nadia is built to handle it.
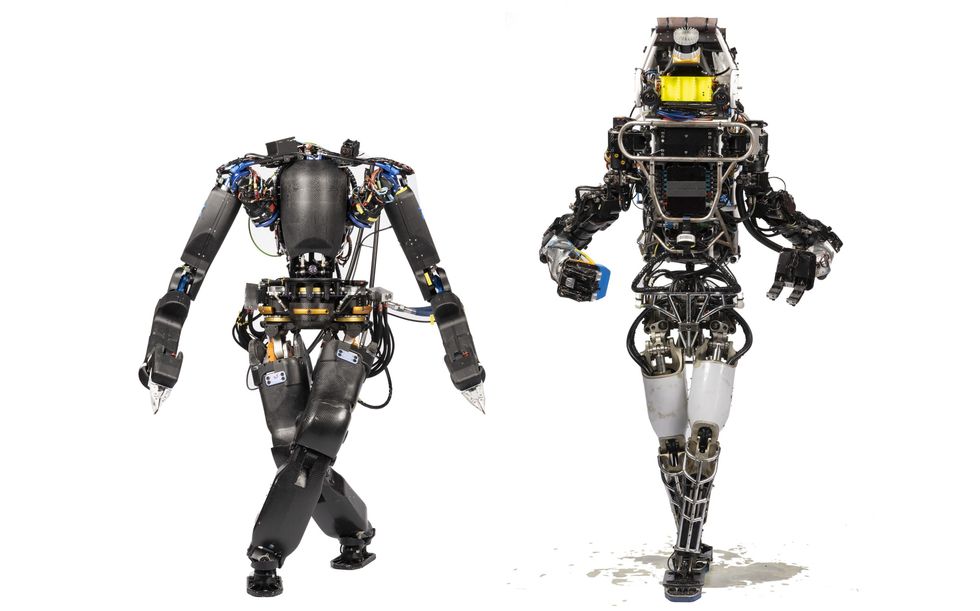
Nadia demonstrates how substantially a lot more flexible its hips and legs are relative to DRC Atlas.IHMC
For far more information about Nadia, we spoke with Robert Griffin, a study scientist at IHMC.
How is Nadia one of a kind amid humanoid robots?
Robert Griffin: I consider the significant issue that we’re trying to deliver to the table with Nadia is the really substantial variety of movement of a whole lot of the joints. And it is not just the array of movement that differentiates Nadia from several other humanoid robots out there, it’s also pace and electrical power. Nadia has substantially improved power-to-body weight than the DRC Atlas, producing it considerably more quickly, which improves its common operational pace as perfectly as its security.
Can you place your targets with Nadia into context in the humanoid robotics place?
Griffin: We’re attempting to make Nadia a robot that can function in unstructured environments in which you do not know what it wants to do forward of time. So, in its place of owning a set sequence or quantity of duties, we’re making an attempt to establish up a robot in components, program, and interfaces that allow a human-device workforce to go into an unfamiliar ecosystem, take a look at it, map it, and then do significant tasks.
IHMC has a status for helping complex humanoid robots like DRC Atlas and Valkyrie with their mobility. How has all of that practical experience manufactured its way into Nadia’s style and design?
Griffin: You’re correct, and we’ve been partnering with NASA JSC considering that the DRC—when you see Valkyrie walking now, it is employing IHMC application and controllers. When it comes to applying some of that information to Nadia, we have paid out unique notice to points like Nadia’s assortment of movement in its legs. As opposed to a good deal of humanoid platforms, Nadia has actually very good hip roll (or ab/adduction), which signifies that it can do definitely broad actions and also really slender techniques where the toes overlap each other. We assume that’s going to help maximize mobility by encouraging with stage adjustment and reaching difficult footholds.
Past the hardware, we had been also in a position to use our simulation resources and regulate stack to genuinely aid us specify what the components style and design wanted to be in get to carry out some of these tasks. We weren’t capable to optimize all of the joints on the robot—we rather much stuck with a one hydraulic piston in the legs, for now, but we hope that our future layouts will be better integrated and optimized. We do have comprehensive ankle actuation, in contrast to a lot of humanoid robots. Our method, from the beginning, was to seem for the necessary manage authority with Nadia’s toes to be able to do precise foot placement, and use that for rather swift reactive mobility.
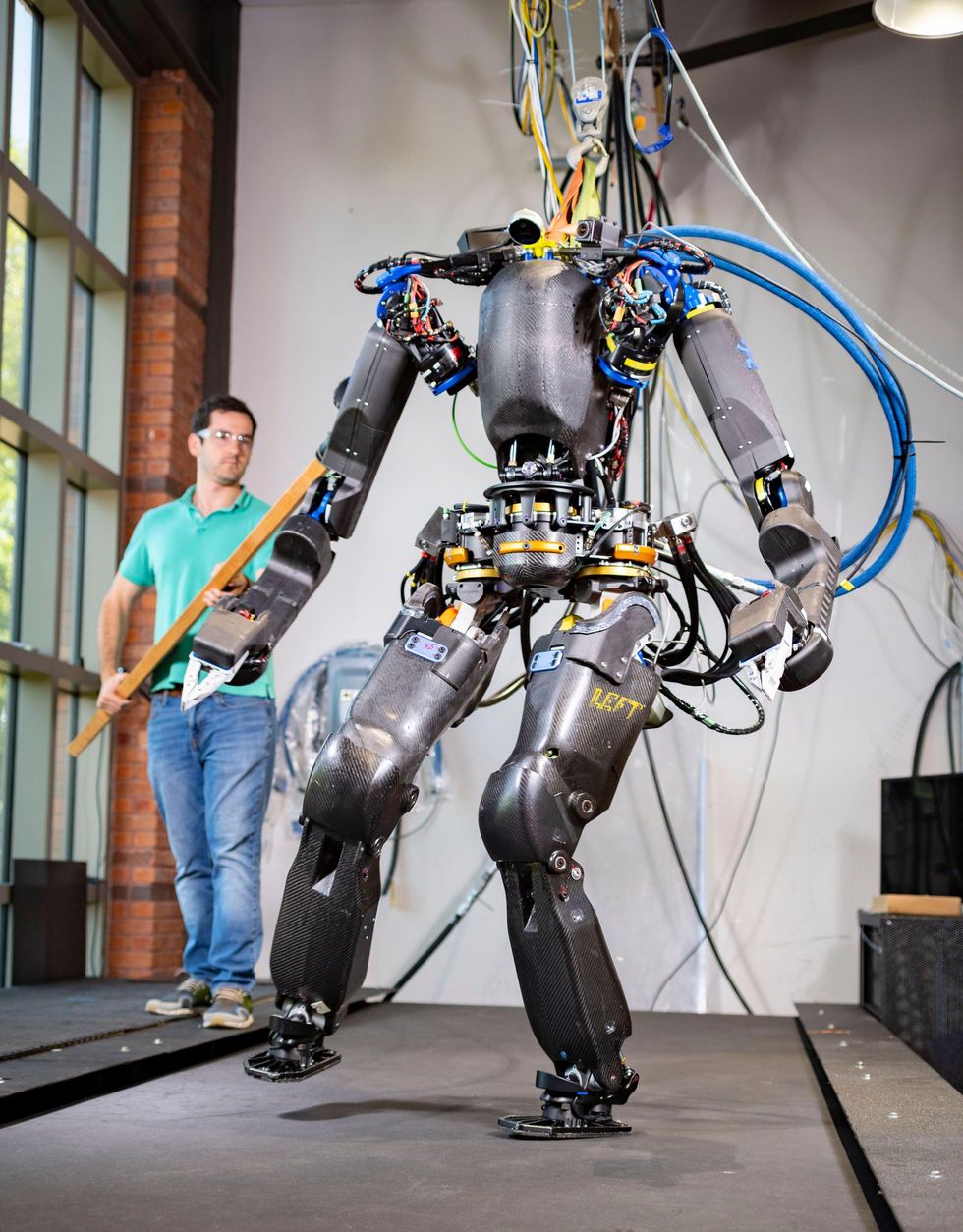
Robert Griffin provides Nadia a practical shove, for science.IHMC
As you went from principle to components with Nadia, what compromises did you have to make?
Griffin: We’re not pretty as flexible as a common human, while we’re not incredibly considerably off. I was shocked that we lost some selection of movement in the mechanisms just for the reason that of the hydraulic hose routing, specially all over the hips, where we wished to keep away from possessing huge loops of hoses hanging off the robot. We sooner or later want to just take Nadia into the real environment, and we don’t want the hoses having snagged on items.
Nadia is not really as speedy as a human in some of the joints, and in some of the joints it’s faster. We’re also not rather as compact as we needed to be at first, since, well, robots are seriously really hard. We’re hoping to get it a tiny more compact in the future. And we skipped our pounds margin by a minor bit—it’s about 90 kilograms correct now, with no the hydraulic pump or battery on board.
Why did you make a decision to emphasis on how a human can right regulate Nadia in VR, as opposed to additional emphasis on autonomy?
Griffin: Autonomy functions definitely, really properly when you know what the functioning problems are, and what you’re trying to complete. Not that it is easy to automate that, but it is feasible. We’ve experimented with some autonomous scheduling and manipulation, and we observed that it’s a tiny restricting in that it does not take advantage of the total capabilities of our platform. And so what we’re searching at accomplishing is trying to automate just critical elements of the system—things like footstep arranging and grasp scheduling, which can be automated really nicely. But we also require the means to interact with novel environments, which is why we’re focusing on producing strategies to group with individuals by interfaces like digital truth. With the cognitive capabilities of a human blended with the manipulation capabilities of the robot, we imagine you get a ton of versatility.
How substantially of a variation has it made to controlling Nadia in VR, that the components has humanlike flexibility and a humanlike workspace?
Griffin: For manipulation, it is been massive. We really don’t want the consumer to be operating the robotic and experience like they are constrained in what they can do since of the robot’s constraints. A ton of the manipulation that we’ve been ready to do with Nadia we could by no means have carried out with our other platforms.
There are surely trade-offs—the arms are much more created for speed than for power, which is likely to be a small little bit limiting, but we’re hoping to boost that lengthy-term. I believe that building the robot—and in particular the regulate technique and software architecture—with the idea of obtaining a human running it has opened up a whole lot of functionality that we hope will let us promptly iterate together several different paths.
What are some issues that Nadia will be uniquely able of?
Griffin: We’re hoping that the robot will be uniquely capable of multicontact locomotion—that’s a path that we’re genuinely hoping to go in, the place we’re not just relying on our ft to go via the globe. But I really do not automatically want to say that it’ll be superior at that than other robots are, simply because I never know every thing that other robots can do.
Are there simple jobs that you hope Nadia will be able to do at some level in the future?
Griffin: Items like catastrophe reaction, nuclear remediation, bomb disposal—these responsibilities are mostly completed by folks appropriate now, since we don’t have robots that are actually capable of doing them sufficiently despite the quantity of time that roboticists have been working on it. I think that by partnering outstanding robotic engineering with seriously remarkable functioning interfaces and human cognition, these jobs will start to become possible to do by a robotic.
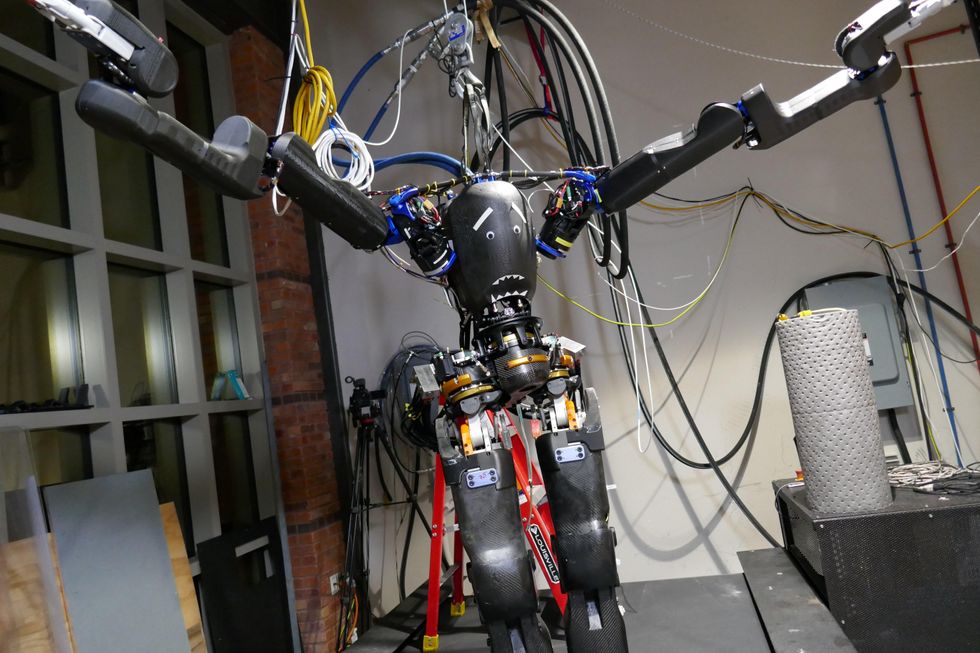
Who wants a authentic head when you have googly eyes and a shark mouth?IHMC
Even however Nadia is brand new, IHMC presently has a bunch of upgrades planned for the robot. The most noticeable a person is slicing that tether by placing batteries and a tailor made hydraulic pump into Nadia’s torso. Also on the road map are bigger torque arms and lighter, more streamlined legs. In the meantime, the computer software has a good deal of catching up to do to make it possible for Nadia to achieve its complete prospective. And if we know IHMC, that’s likely to be an amazingly remarkable matter to see.